Resistencia de materiales
Tipos de soportes en el plano y en el espacio 3D
- qué es un soporte en la mecánica de estructuras
- qué grados de libertad de movimiento en el plano
- qué tipos de soportes tenemos en el plano
- soporte articulado deslizante
- soporte articulado no deslizante
- barra de celosía/tirante/cuerda
- fijación completa/soporte
- fijación con deslizamiento/rastrillo
- bloqueo de rotación/cuña
- qué grados de libertad de movimiento en el espacio 3D
- qué tipos de soportes tenemos en el espacio 3D en sistemas como:
- andamios articulados
- andamios rígidos
- marcos 3D
¿Qué es un soporte en la mecánica de estructuras?
Un soporte en la mecánica de estructuras es un elemento que proporciona reacción a las fuerzas y momentos que actúan sobre la estructura o construcción. En el contexto de la ingeniería y el diseño de estructuras, los soportes son componentes esenciales que permiten la transferencia de cargas, garantizan la estabilidad y el equilibrio de la estructura y permiten su funcionamiento de manera segura y eficiente.
Número de movimientos independientes que un objeto puede realizar en un plano
Diferentes tipos de soportes limitan diferentes posibilidades de movimiento en el plano o en el espacio.
En el plano existen tres grados principales de libertad de movimiento:
- Translación a lo largo del eje X: Es el movimiento a lo largo del eje horizontal X, que permite al objeto desplazarse en el plano hacia la izquierda o hacia la derecha.
- Translación a lo largo del eje Y: Es el movimiento a lo largo del eje vertical Y, que permite al objeto desplazarse en el plano hacia arriba o hacia abajo.
- Rotación alrededor del eje vertical (Z): Es el movimiento de rotación del objeto alrededor de un eje perpendicular al plano, comúnmente llamado eje Z. Este movimiento permite que el objeto gire alrededor del centro del plano.
Es importante notar que los grados de libertad pueden variar dependiendo del contexto y la especificidad de la construcción. Por ejemplo, los grados de libertad de un mecanismo complejo pueden incluir movimientos adicionales, como inclinación o rotación alrededor de otros ejes.
En el análisis del movimiento de objetos en el plano, estos tres grados básicos de libertad constituyen un punto de referencia clave.
Tipos de soportes en el plano
Dado que en el plano tenemos tres grados de libertad de movimiento, los soportes pueden eliminar estos grados de libertad en diferentes combinaciones. La eliminación por parte del soporte de la posibilidad de movimiento por ejemplo horizontal está relacionada con la aparición de una reacción en el soporte en esa dirección. Primero, caracterizaremos brevemente los tipos de soportes en el plano, y luego, para mayor claridad, presentaremos en una tabla la siguiente información sobre los soportes en el plano:
- nombre(s) popular(es),
- símbolo(s) gráfico(s),
- qué reacción ocurre en él,[ [PROTECTED_146_HTML]]
- qué grado de libertad de movimiento elimina.
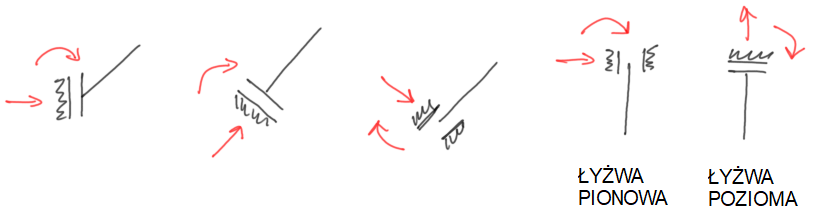
a) soporte articulado deslizante
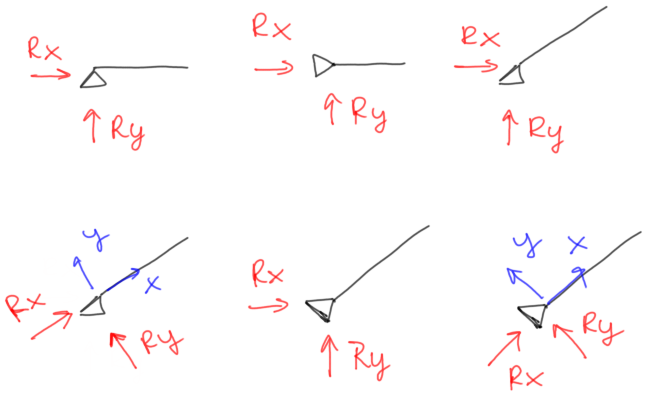
Bloquea la posibilidad de movimiento lineal en una dirección, permitiendo el movimiento en dirección perpendicular a la bloqueada y la rotación. Las designaciones gráficas que encontraremos en la literatura:

La línea horizontal debajo del símbolo triangular del soporte articulado muestra en qué dirección hay posibilidad de movimiento. Se bloquea la dirección perpendicular a la posibilidad de movimiento y en esa dirección se genera una reacción. Por supuesto, el soporte articulado puede ser utilizado en diferentes ángulos, como se muestra a continuación:

Si el soporte y la reacción están en un ángulo a menudo, para simplificar los cálculos, será más conveniente descomponer esa reacción en componentes:

Al descomponer en componentes en los cálculos utilizamos ya sea una reacción resultante (roja) o ambas componentes (azules) – nunca ambas a la vez. Esto significa que al escribir la ecuación de equilibrio estático o al determinar las fuerzas internas utilizamos ya sea las componentes o la reacción resultante.
b) soporte articulado no deslizante
En el soporte articulado no deslizante también hay realmente una reacción, sin embargo no conocemos su dirección. Por lo tanto, es mejor marcar desde el principio dos componentes de esta reacción. No tienen que ser necesariamente verticales y horizontales, pero deben ser perpendiculares entre sí. También vale la pena mencionar que las direcciones de la reacción nunca tienen importancia y son solo una cuestión de nuestra suposición. En el dibujo a continuación, además del símbolo del soporte, se ha marcado la barra que sale de él (por supuesto, tampoco importa en qué ángulo sale la barra del soporte)

¡Atención! Si la barra que sale está además terminada con una articulación también en el otro lado, entonces estamos tratando con una barra de celosía/tirante/cuerda de la que encontrarás más información más abajo.
A menudo, el dilema sobre cómo marcar la reacción surge cuando vemos un soporte no deslizante girado en un ángulo diferente. Hay que recordar que en un soporte así siempre tenemos dos reacciones perpendiculares entre sí y depende de nosotros en qué direcciones marcaremos esas reacciones. Cada variante mostrada a continuación está bien.
c) barra de celosía/tirante/cuerda
Podemos encontrarnos, por ejemplo, con este tipo de soporte para una viga/montante – soporte articulado no deslizante + sujeción con cuerda (Ver ejemplo gratuito 1)

o con la sujeción de la viga solo con cuerdas. (Ver ejemplo gratuito 2)
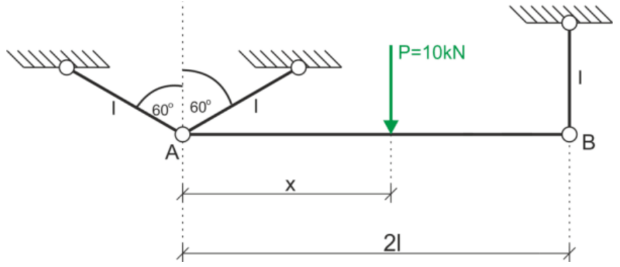
Para que podamos hablar de una cuerda/tirante/barra de celosía deben cumplirse las siguientes suposiciones:
- la barra debe estar terminada en ambos extremos con articulaciones (son los nodos de la barra),
- la barra debe ser lineal (no puede tener quiebres, ver ejemplo a continuación),
- no puede haber carga entre los nodos, la carga puede ser aplicada como máximo en el nodo
- (teniendo en cuenta que si es un momento concentrado no puede ser aplicado estrictamente en la articulación, debe ser aplicado de un lado o del otro de la articulación) La barra de celosía se caracteriza principalmente por el hecho de que:
solo existe fuerza axial (normal),
- no existen fuerzas cortantes ni momentos flectores.
- A continuación
un ejemplo de dos barras de celosía, a la derecha debido a la falta de articulación en el medio la barra no es lineal, por lo que no estamos tratando con una barra de celosía, sino con un sistema de marco apoyado en dos soportes articulados no deslizantes.
 Fig. 8. Ejemplo de clasificación de una barra de celosía y un sistema de marco
Fig. 8. Ejemplo de clasificación de una barra de celosía y un sistema de marco
Intersección de la barra y mostrar las fuerzas internas en la barra (axiales) y rechazar las partes hacia afuera de la construcción
- Mostrar la reacción en el extremo de la barra, fuera de la construcción, es decir, en el soporte; la reacción solo ocurre en el eje de la barra
-
 Fig. 9. Segunda variante de la reacción en la barra de celosía y reacciones en el sistema de marco apoyado en articulaciones.
Fig. 9. Segunda variante de la reacción en la barra de celosía y reacciones en el sistema de marco apoyado en articulaciones.
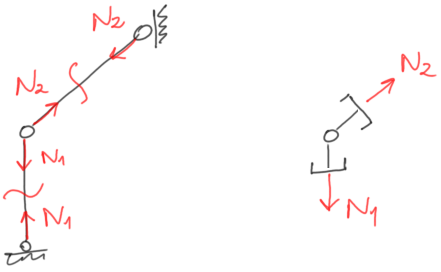
cortamos a través de la barra,
- mostramos las fuerzas en la barra (siempre hacia sí mismas o alejándose – es mejor asumir como arriba, es decir, hacia sí mismas – entonces asumimos que la barra está siendo estirada),
- rechazamos esas partes hacia afuera de la construcción.
- Para este ejemplo, esta operación nos lleva a el equilibrio del nodo
d) anclaje completo/soporte
El anclaje completo
, es decir, el popularsoporte elimina todas las posibilidades de movimiento en el plano, por lo que la posibilidad de movimiento lineal y la posibilidad de rotación se ven afectadas. Por lo tanto, presenta tres reacciones, dos reacciones perpendiculares entre sí en forma de fuerzas concentradas y un momento flector concentrado. Al igual que en el caso del soporte articulado no deslizante las direcciones y sentidos de las reacciones son una cuestión de nuestra suposición (solo recordamos que las reacciones concentradas deben ser perpendiculares entre sí).
 Fig. 11. Formas de marcar el soporte y las reacciones en él
Fig. 11. Formas de marcar el soporte y las reacciones en él
El anclaje con deslizamiento permite el movimiento lineal en una dirección
, bloqueando al mismo tiempo el movimiento lineal en dirección perpendicular y la rotación. Podemos distinguirla guía vertical y horizontal, pero el anclaje con deslizamiento también puede ser en cualquier ángulo, a continuación algunas posibilidades de marcar la guía junto con las reacciones en ella.
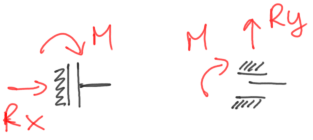 Fig. 12. Guía vertical y horizontal junto con las reacciones en ellas
Fig. 12. Guía vertical y horizontal junto con las reacciones en ellas
usando el principio de trabajos virtuales
y, por supuesto, lo encontramos casi en cada tarea del área de mecánica de estructuras –métodos de desplazamientos. El bloqueo de rotación
esuna unión que bloquea, como su nombre indica, únicamente la posibilidad de rotación de un punto (nodo). Podemos encontrar tales designaciones de bloqueo de rotación:
 Fig. 14. Designación gráfica del soporte/unión – bloqueo de rotación
Fig. 14. Designación gráfica del soporte/unión – bloqueo de rotación
una reacción en forma de momento flector, el nodo tiene libertad de movimiento en cualquier dirección, pero no puede rotar – esto significa que la forma del nodo después del desplazamiento debe ser la misma que antes del desplazamiento. La primera designación gráfica a la izquierda se asemeja a una cuña y con ese nombre de unión también podemos encontrarnos. La tercera designación, por otro lado, se asemeja a una guía tanto vertical como horizontal. Grados de libertad de movimiento en el espacio 3D
Enel espacio tridimensional
(3D) existenseis grados principales de libertad de movimiento, que determinan el número de movimientos independientes que un objeto puede realizar. Aquí están esos grados de libertad: Translación a lo largo del eje X,
- Translación a lo largo del eje Y,
- Translación a lo largo del eje Z,
- Rotación alrededor del eje X,
- Rotación alrededor del eje Y,
- Rotación alrededor del eje Z.
- Todos estos grados de libertad juntos definen cómo un objeto puede moverse y rotar en el espacio 3D. Gracias a esta clasificación, los ingenieros y diseñadores pueden analizar y modelar los movimientos de objetos y estructuras en tres dimensiones.
En el sistema plano
teniendo 3 grados de libertad de movimiento (translación X, translación Y, rotación Z)hemos logrado detallar 6 tipos de soportes dependiendo de en qué combinaciones los soportes eliminan las libertades de movimiento permitidas. Será difícil realizar una clasificación de los soportes en el espacio 3D, por lo que a continuación daremos más bien principios generales sobre los soportes y los soportes más populares en construcciones como:
armazones articulados,
- armazones rígidos,
- marcos 3D.
- Un armazón se define como
, que está cargada perpendicularmente al plano de las vigas del armazón. Debido a la forma en que se conectan las vigas del armazón, podemos distinguir: a) armazones articulados
Las vigas del armazón están conectadas entre sí de forma articulada,de manera que les permite rotar libremente entre sí
. Esta conexión solo permite la transferencia deuna fuerza vertical (perpendicular al plano de las vigas del armazón) a través de un balancín. Dado que la carga del armazón actúa en dirección perpendicular al plano de las vigas y debido a que las vigas solo transmiten fuerzas transversales entre sí, en un armazón articulado solo existen fuerzas transversales y momentos flectores
. Esto afecta a qué reacciones pueden ocurrir en los soportes, y así podemos distinguir soportes como:- soporte articulado Sin embargo, no importa si está dibujado como deslizante o no; de todos modos, no marcamos reacciones en el plano del armazón, solo la reacción fuera del plano
.
Fig. 15. Formas de marcar el soporte articulado en un armazón articulado
- guía vertical
Fig. 16. Guía vertical junto con las reacciones para un armazón articulado
- anclaje completo

Fig. 17. Anclaje completo junto con las reacciones para un armazón articulado
Las soluciones de problemas de armazones articulados las encontrarás en el Curso en línea
b) armazones rígidos Las vigas del armazón están conectadas entre sí de forma
rígida(se puede imaginar como si las barras estuvieran embebidas una en la otra).
La flexión de las barras dispuestas en una dirección provoca la flexión y torsiónde las barras en la otra dirección. En los armazones rígidos tenemos los mismos soportes que en los armazones articulados, sin embargo, aquí la diferencia es que también tratamos con torsión, por lo que en el anclaje
además dela reacción en forma de momento flector también habrá una reacción en forma de momento torsional. También tendremos más opciones de guías (o bloquea la flexión, o la torsión, o ambas). Tipos de soportes en armazones rígidos: - soporte articulado Exactamente igual que en el armazón articulado. No importa si está dibujado como deslizante o no; de todos modos, no marcamos reacciones en el plano del armazón, solo la reacción
fuera del plano.

- guía vertical
con reacción en forma de momento flector,
con ambos momentos mencionados anteriormente.
- Y aquí tenemos una forma diferente de marcar la guía que antes, en general, en la literatura no he podido encontrar en ningún lugar una guía para un armazón rígido, pero esta designación mostrada a continuación parece razonable, también coincide con la designación que aparece, por ejemplo, en el programa Robot Structural Analysis.
- Fig. 19. Guías verticales junto con las reacciones a continuación para un armazón rígido

Y bueno, esta primera designación a menudo puede ser utilizada como un anclaje completo, por lo que es mejor especificar si hay tal posibilidad qué tipo de soporte tiene en mente la persona que dibujó el tema de la tarea.

c) marcos 3D
- barra de soporte/soporte articulado deslizante
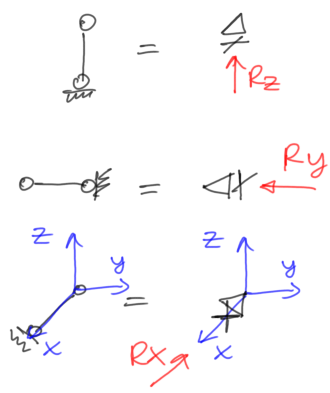
En un lugar puede haber una, dos o tres direcciones bloqueadas, así que ahora una variante con dos bloqueos en un lugar
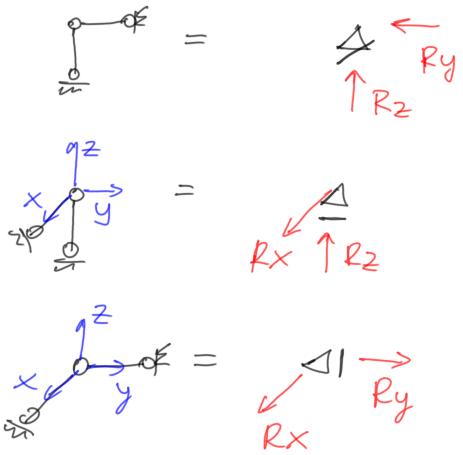
- soporte articulado no deslizante

- anclaje completo
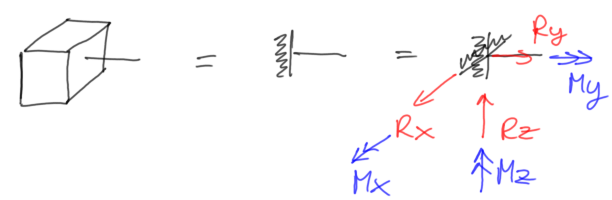
Con otro tipo de soporte que los mencionados anteriormente en sistemas espaciales, probablemente no te encontrarás (no me ha sucedido), en general, como regla, también puede estar bloqueada en cualquier combinación alguna dirección de movimiento y la posibilidad de rotación en alguna dirección, por ejemplo

y similares.