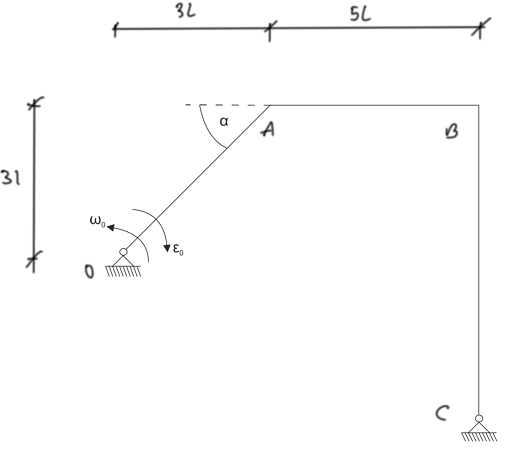
Obliczyć prędkość i przyspieszenie punktu B. Dane: $$ \omega_{0}, \varepsilon_{0}, l \text {, } $$
Obliczyć prędkość i przyspieszenie punktu B. Dane: \( \omega_0, \varepsilon_0, l \)
Obliczyć prędkość punktu C. Dane: \(\omega_0, OA=l, BC=2l\)
Obliczyć prędkości punktów B, C i D. Dane: \( \omega_0, l \)
Obliczyć prędkości w punkcie B, C i D. Dane: \(\omega_0, OA || CD, l\)
Obliczyć prędkości punktów B,C i D. Dane: \(\omega_0, l, \alpha, ED=5l\)
Obliczyć prędkość i przyspieszenie punktu B. Dane: \(\omega_0, \varepsilon_0, l\)
Obliczyć prędkość i przyspieszenie punktu B. Dane: \(\omega_0, \varepsilon_0, l,\)